Introduction
With the development of industrial automation, AGVs (Automated Guided Vehicles) have become key tools in logistics automation. Many factories, warehouses, and logistics centers have applied AGV pallet solutions to achieve the smart logistics processes, thereby improving efficiency, accuracy, and safety, while reducing errors and labor intensity.
In this automated system, machine vision plays a vital role. Firstly, it enables obstacle detection and avoidance. Through real-time image processing and target recognition algorithms, AGVs can identify and determine obstacles in the surrounding environment, take appropriate avoidance actions, and ensure safe passage. Secondly, machine vision can be used to assist AGV navigation and positioning. 3D cameras or LiDAR sensors provide AGVs with accurate navigation information to reach target locations. Furthermore, AGVs equipped with visual systems are also helpful in cargo/pallet identification and handling by identifying pallet jacks.
.jpg "摄图网_600108597_工厂自动叉车(企业商用).jpg")
In recent years, the rapid development of 3D vision technology in the AGV field has become a key factor in enhancing intelligence levels and achieving more efficient, accurate, and safe logistics operations. In outdoors, the two most common types of 3D vision technologies used for AGV pallet solutions are Stereo depth technology and Time-of-Flight (ToF) Technology. Both of these two can capture depth information on moving objects, but there are still some differences in their performance.
In this study, we selected one globally recognized stereo depth camera and one RGB-D Industrial ToF depth camera DS77 from Vzense Technology Inc. for a comparative imaging test under strong outdoor lighting conditions within 2 meters. Hope this test can bring you reference value.
Technical Principles and Representative Products
- Stereo depth technology

Stereo depth technology (binocular vision technology) consists of two cameras that simulate human eyes and calculate the distance from objects to the cameras using triangulation. These two cameras are installed at a certain distance to obtain different perspectives. By simultaneously capturing left and right images of the same scene and analyzing the disparity (shift between corresponding points in the two images), the depth information of objects in the scene can be calculated. To enhance data accuracy, active projection light sources with special patterns, such as infrared light or structured light, are often used in conjunction with binocular vision technology. By analyzing the disparity between the left and right images and the variation in the light field, the depth information of objects is calculated. Globally recognized representative products include Intel® RealSenseTM D400 series and ZED Stereo cameras.

Intel® RealSenseTM D435
- Time-of-Flight(ToF)technology

The principle of ToF technology involves emitting photons from the ToF module's light source to the object being measured. These photons are then reflected back to the ToF depth camera and received by an image sensor. Distance data can be obtained by measuring the "flight time" of these photons and knowing the speed of light. ToF depth camera technology is a non-scanning 3D imaging depth capture technique with an optical system as the receiving path's array imaging. Globally recognized representative products include Microsoft's Azure Kinect, Lucid Helios, and Basler Blaze.


Azure Kinect DK Vzense® DS Series
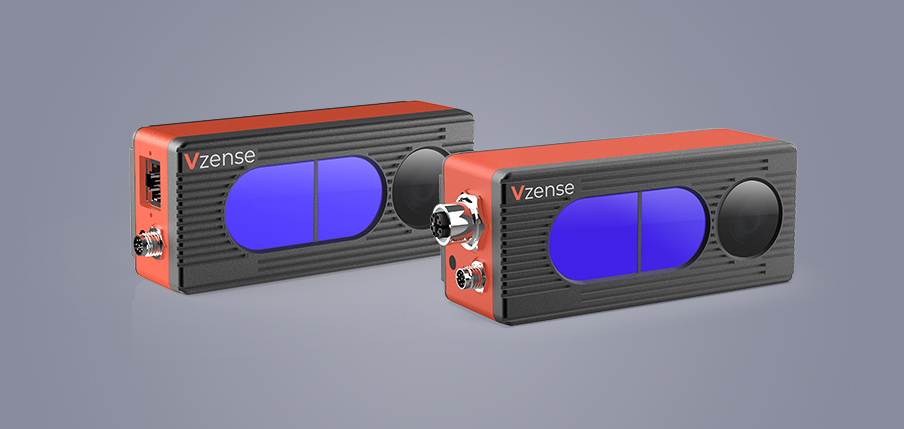
Vzense Technology, a rapidly growing industrial-grade ToF depth camera manufacturer and provider, has also introduced the cost-effective ToF depth camera DS77 module based on Sony DepthSense iToF CMOS.
Test comparison
Recognizing outdoor scenes and low-reflectance objects has always been a challenge in AGV pallet identification solutions. If the light intensity suddenly increases during image capture, it leads to overexposure in certain parts of objects or generates significant brightness and darkness differences. This results in a decrease in image quality, loss of details, and consequently affects the accuracy. Moreover, black objects (such as packages, pallets, and shelves) pose a difficulty due to their ultra-low reflectance, making it challenging for cameras to capture high-quality data.
Aiming at this, the following performance comparison tests were carried out.
Test conditions: Outdoors, direct sunlight, light intensity about 60,000Lux
Measured object: 1m*1.2m black pallet and blue pallet
Camera model: A stereo depth camera and Vzense® ToF camera DS77

Test scene
Test 1:
Comparison of point cloud data of the black pallet from different angles at distances of 1 meter and 1.5 meters respectively

Test 2:
Comparison of point cloud data of the blue pallet from different angles at distances of 1 meter and 2 meters respectively.

Test 3:
Comparison of enlarged point cloud data of the blue pallet and black pallet at 1 meter from the same angle.

Based on the data of the above multiple sets of tests, it is easy to see that the ToF depth camera DS77 has better light resistance, data stability and flatness at 1 to 2 meters outdoors, which is more suitable for outdoors AGV pallet solutions. This is not only due to the advanced SONY CW iToF chip equipped in Vzense® DS77, which combines CAPD and backside illuminated (BSI) CMOS technology enabling high-precision depth data. It also benefits from the Vzense team's years of focus on ToF sensing technology, incorporating multi-frequency mode and high dynamic range (HDR) technology into product R&D and design. By capturing images using multiple frequencies and different exposure times, even some complex scenes can be accurately measured down to the millimetre level.
New Product Introduction of Vzense® DS Series

DS86&DS87 - RGB+ToF Depth Camera
- Lightweight design, compact structure, smaller size and lighter weight
- Side outlet design makes installation and use more convenient
- IP42/IP67 waterproof and dustproof are optional to meet the needs of complex environments
- Optimized RGB resolution makes colour images clearer
- The RGB image and the depth image are synchronized at the microsecond level to capture the 3D data in real-time
- Supports Depth HDR mode for adapting to high contrast and complex scenes
- Less affected by ambient light, ability to accurately identify objects in the dark and in bright light
- Soft/hard trigger modes support multi-camera work at the same time

 EN
EN









.jpg)