DS77Specification |
 |
 |
| Product Name |
DS77 Pro |
DS77 Lite |
| ToF Sensor |
Sony CW iToF , 640*480dpi |
Sony CW iToF , 640*480dpi |
| ToF Frame Rate |
Max. 25fps |
Max. 25fps |
| Emitter |
940nm VCSEL*2 |
940nm VCSEL*2 |
| ToF Field of View |
70°(H)* 50°(V) |
70°(H)* 50°(V) |
| RGB Module |
No RGB |
No RGB |
| RGB Field of View |
No RGB |
No RGB |
| Power Supply |
PoE+/12V~24V DC |
12V~24V DC |
| Physical Connection |
M12 Aviation Plugs |
RJ45+DC Jack |
| Communication |
1000M ethernet&RS485 |
1000M ethernet&RS485 |
| Output Format |
16bit(depth)+8bit(IR) |
16bit(depth)+8bit(IR) |
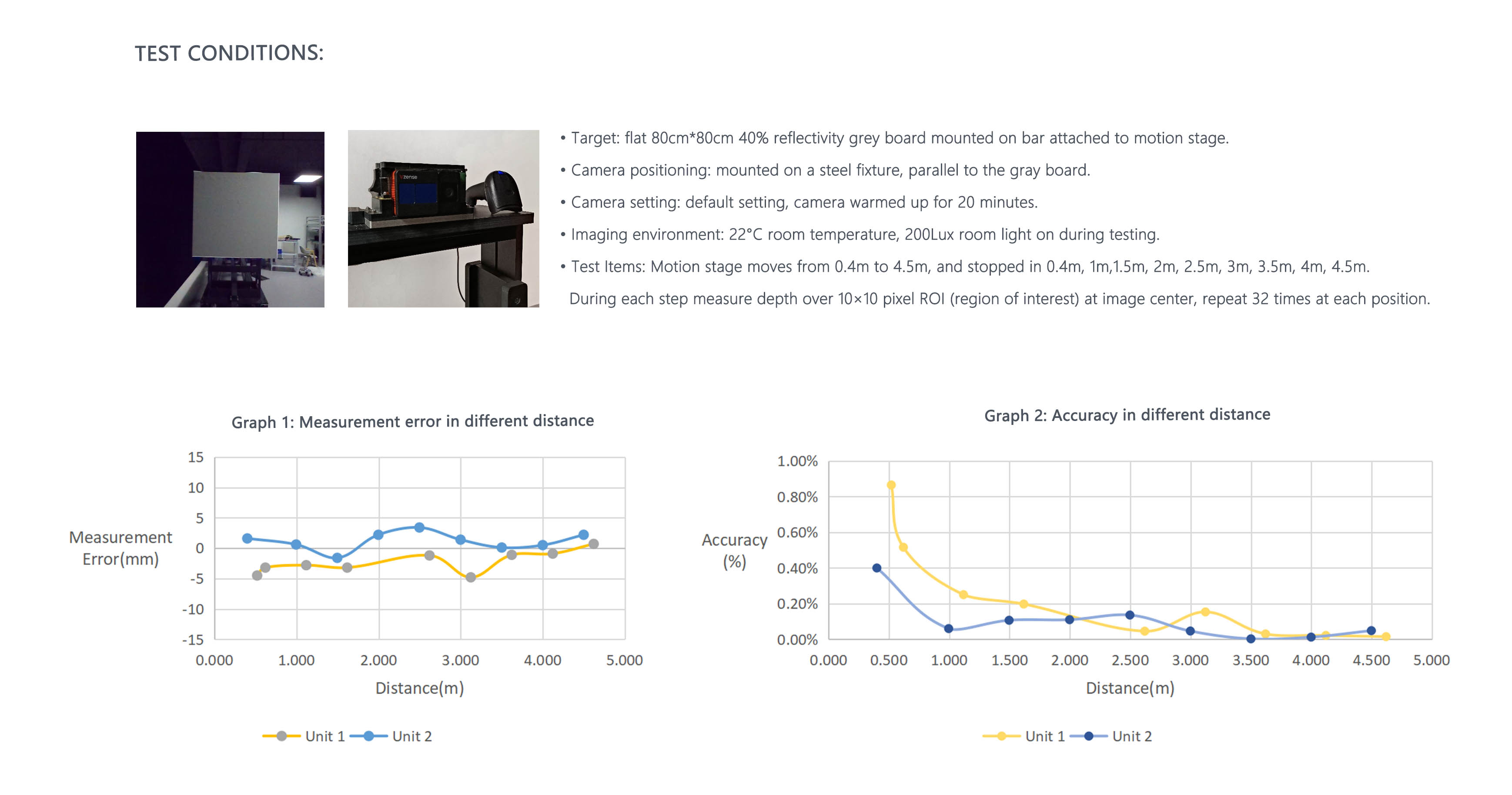
| Accuracy |
<1%(4mm@1m) |
<1%(4mm@1m) |
| Work Range |
0.15~5m |
0.15~5m |
| Work Temperature |
-20°C ~ 50°C |
-20°C ~ 50°C |
| Operation System & Platform |
Windows/Linux/Arm Linux/ROS1/ROS2 |
Windows/Linux/Arm Linux/ROS1/ROS2 |
| SDK Support |
C/C++/Python/C# |
C/C++/Python/C# |
| IP Rating |
IP67 |
IP42 |

[Operation] Why can I search for network devices but can't turn on the camera?

There are several situations when the camera cannot be turned on when the webcam is found: 1 Whether the connection between the camera and the host is good, and whether the network card of the host is available. 2. The camera and the host are not in the same network segment. If the camera is set to a non DHCP mode, make sure that the fixed IP address of the camera is on the same network segment as the host, such as 192.168.1. X. If the camera is set to DHCP mode, please ensure that the camera and the host are in the same LAN, and the router/switch has the DHCP sever function. 3. Whether the network permission to run the software is restricted. 4. Whether the UDP function of the network is prohibited by the LAN security policy. 5. Whether the 900790089009 port number of the LAN is prohibited. 6. Whether the power supply of the camera is sufficient. If you use a non PoE mode, make sure that the adapter is turned on and plugged in. If none of the above measures can solve the problem, please use the ipconfig command to check the network status on the PC side, and disable the network except for the same network segment with the camera to search for devices again. If the problem still can’t be solved after that, please contact our engineer for support.
[Operation] After using the upgrade tool to upgrade the Windows system, how to solve the problem of flash back of the operating platform?
There is an upgrade driver in the upgrade tool. If the driver is not installed, this problem will occur. After the driver is successfully installed, the flash back problem will be solved.
[Operation] Why can't I open the IR map and depth map saved through GUI? How to view the point cloud map?
Whether for UTool used by DCAM series or NebulaGUI used by DS series, the IR and Depth images saved by both are 16bit image data, which cannot be opened by using the system's own image browser, but can be opened and viewed by using software such as ImageJ; The point cloud map saved by the GUI is in. txt format. From top to bottom, it is the coordinate point information from pixel 0 to the last pixel. The values in each row are the X, Y, Z coordinates of the pixel. The saved point cloud map can be viewed using CloudCompare software. For related instructions, please refer to the link:https://cdn.yun.sooce.cn/4/62267/pdf/16339227552770a0bd9e3dcaf8a6b.pdf
[Operation] [DS Series] How to improve the camera's detection of black objects?
TOF camera calculates the distance from the object to the camera by calculating the time between the light from the camera and the return light from the object received by the camera. Different object surface colors and materials have different reflectivity and absorptivity to light. Therefore, if the measured object is a smooth black object, it may not be recognized. The following methods can be tried: 1. Reduce the product frame rate (for example, 5 frames) and increase the exposure time (for example, 4000); 2. Change the Confidence filter threshold to 2 or 5
[Operation] [DS Series] How to change the default parameters of the product (such as output mode, IP settings, etc.)?
DS series does not support parameter configuration such as device output mode, but only supports changing device network mode and IP. If you need to change the camera output mode, frame rate and other parameters, you can call the SDK interface. For specific methods, refer to the SDK development documentation. Change IP tool: https://github.com/Vzense/NebulaGUITool (Including usage documents)
[Operation] [DS Series] How to upgrade the firmware of the Vzense DS Series ToF camera?
You can upgrade through NebulaGUITool under Windows. The link is: https://github.com/Vzense/NebulaGUITool (Including upgrade firmware and usage documents)
[SDK] The development language and operating system platform supported by Vzense ToF camera?
Development language: C/C++, ROS, Python, C # operating system: Windows/Linux/Arm Linux
[SDK] How to use Vzense products for secondary development?
Vzense Software Development Kit (SDK) supports SDKs of different software platforms and programming languages to help users quickly build and expand customized solutions. SDK download link: https://github.com/Vzense
[SDK] Does the depth value of each point of the camera refer to the distance from the point to the camera point or the distance from the point to the camera plane?
The default is the distance from the point to the camera plane. You can call interface Ps2_ SetComputeRealDepthCorrectionEnabled: true (the default value) represents the distance from the point to the camera plane; False represents the distance from the point to the camera point.
[SDK] How to obtain color point cloud with RGB mapping in SDK?
The SDK does not directly provide samples of color point clouds with RGB mapping. Call can be completed according to the following process: 1. Set VZ_ SetTransformColorImgToDepthSensorEnabled to Enable; 2. Obtain VzTransformedColorFrame image and point cloud generated by depth; 3. Save the VzTransformedColorFrame and point cloud obtained in 2 as a xyzrgb point cloud file.
[SDK] When running the program under Tools of the Linux Base SDK, if it prompted with "error while loading shared libraries xxx.so file too short", what is the reason?
The above errors are generally caused by the user downloading and unzipping the SDK on a Windows computer, and then copying the unzipped file to the Linux system. Please copy the downloaded SDK package directly to the Linux system, unzip it on the Linux system, and then run it.
[SDK] During the use of SDK, can the Ps2_ ReadNextFrame timeout be changed?
Yes, set up via interface Ps2_ SetWaitTimeOfReadNextFrame. Please refer to the SDK documentation for specific steps.
[SDK] During the use of SDK, what is the reason for the timeout of Ps2_ ReadNextFrame?
Ps2_ ReadNextFrame is used to query the SDK image ready. If there is no ready, it will sleep and wait. If the image cannot be obtained during the default waiting time, it will timeout and exit. The default timeout is 350ms. However, if the user uses the slave trigger mode, because the trigger frequency is uncertain, when the frequency exceeds the default timeout, the user will also receive a read timeout, but the use will not be affected.
[SDK] Where is the Vzense SDK log stored?
Windows: C:\Users\xxxx\AppData\Local\Vzense\Log Linux: /home/.config/Vzense/Log
[SDK] Are the images displayed using Vzense graphical software tools for post-processing? How to view the effects of various post-processing algorithms?
Yes. Users can use GUI tools to adjust and set the switches of various processing effects according to the instructions, determine the required processing effects or parameters according to their own project needs, and adjust the module default values through various interfaces in the SDK.
[SDK] [DS Series] How to solve the problem if reporting errors when compiling Nebula SDK?
First, ensure that the downloaded Nebula SDK is unzipped under the Linux system, and do not copy it for use after unzipping in the Windows system; Secondly, ensure that all files in the lib folder (including the config file) are copied to your own project files.
[Product] How does the ToF camera perform outdoors (strong sunlight)?
The image captured by the ToF camera can maintain high stability when the light changes, which is one of the reasons why many users choose the ToF camera. To understand the performance of Vzense ToF camera outdoors, you can view this video: https://youtu.be/SWUsVR0-I54
[Product] How to customize Vzense 3D ToF module?
For batch requirements, Vzense can deeply customize 3D ToF modules in terms of appearance design, size and structure, use distance, view angle, interface protocol and operating system SDK. According to different customization requirements, the development cycle varies. Generally, it takes 2-3 months for prototype samples, and it takes a total of 5-6 months for products to reach the mass production stage.
[Product] Does too high ambient temperature affect the stability of the camera?
The stability of the module will not be affected when the environment temperature is not higher than the temperature marked on each product. It is recommended that the limiting service temperature should not exceed - 20 ℃~60 ℃. All types of camera products have been tested for high and low temperature reliability. If it needs to be used in extreme high temperature environment, it is recommended to add external heat dissipation design, such as heat sink or fan, which will protect the mold from long-time operation.
[Product] Why does the depth image bend when taking a right angle wall with a ToF camera?
Multipath interference will occur in the corners of right angles, the light from the camera will reflect back and forth in the corners, so it looks like there will be radian.
[Product] Can the ToF camera be used in rainy days? Will rain wet the lens affect the camera performance?
Rainy environment will affect the measurement accuracy of the camera, so it is not recommended to use it in rain. For several cameras meeting IP67 standard, the camera will not be damaged in rainy environment.
[Product] How long will there be a delay between the image generation of the Vzense ToF camera and the acquisition through the SDK?
The delay of Vzense ToF cameras of different models will be different due to different transmission interfaces and host performance, and the range is about 50~100ms. The user can test the platform by using the soft trigger mode.
[Product] Is the light source used by Vzense ToF camera harmful to human body?
The total power of VCSEL device used in Vzense ToF camera does not exceed 2W. The product has passed the FDA Class 1 eye safety level certification, and will not cause harm to human body.
[Product] When using Vzense ToF depth camera to measure black, high reflectivity and transparent objects, will the measurement accuracy be affected?
When using DCAM Series to measure black, high reflectivity and transparent objects, the reflectivity of the object surface is too high/low, which will interfere with the reflection light path to a certain extent, resulting in reduced accuracy or even inability to image. But for DS Series, this problem has been solved by the HDR mode added. In addition, when the ToF depth camera is measuring objects, if the light path in front of the lens is blocked, the measurement accuracy will also be reduced.
[Product] Can the lens surface of Vzense's ToF camera be protected by adding a transparent cover plate?
No.The product body has been equipped with a protective cover plate. If you have additional requirements for the hardness of the cover plate, you can contact us for customization. The maximum hardness can reach 9H. If the user adds a cover plate by himself/herself, it will interfere with the optical path of the ToF module, which will greatly affect the imaging quality and accuracy of the module.
Learn more in GitHub or FAQ for SDK question

 EN
EN